У истоков промышленной революции: робо-руки
С момента, когда чешский писатель Карел Чапек “одолжил” у брата слово “робот” (robota переводится с чешского как “каторга”, “тяжелая робота” или “барщина”) и использовал его для описания искусственно созданных людей в пьесе R.U.R, прошло практически 100 лет.
Современный промышленный робот FANUC M-20i
Привычные нам “робо-руки” или манипуляторы, определившие контуры современного высокотехнологичного массового производства, появились порядка 60 лет назад. У истоков прорыва стоят два человека: американцы Джордж Девол (подавший патентную заявку о “программируемом изделии для перемещений” в 1954 году) и “отец робототехники” Джозеф Энгельбергер (сооснователь компании Unimation, представивший промышленному миру изобретение the Unimate).
Изображение: Google Patents. Источник изображения.
“Программируемое изделие для перемещений” на поверку оказалась прадедушкой привычной нам робо-руки автоматических промышленных систем — впрочем, слова “робот” в заявке не упоминалось. В 1932 году Девол основал компанию United Cinephone, которая впервые задействовала фотоэлементы в машинном оборудовании. Интересно, что именно он впоследствии изобрел привычные нам автоматические двери.
В 1940-х Девол задумался о создании “машин, которые можно будет учить” — устройств, исполняющих перечень запрограммированных команд. Получив соответствующий патент, изобретатель приступил к работе по созданию “робо-руки” или “манипулятора”. В 1957 году Девол встретил Энгельбергера: последнего сразу же заинтересовала идея подобных роботов, что и привело к основанию компании Unimation и представления первой системы Unimate широкой публике.
Сооснователь лаборатории ИИ при MIT Марвин Минский представил “руку-щупальце” в 1958 году: устройство получило массу сочленений и отличалось впечатляющей гибкостью.
Изобретать и конструировать роботов всегда было проще, чем коммерциализировать и внедрять. Слово “робот” в то время использовалось в первую очередь в научной фантастике: производители, напротив, практически не обращались к подобной терминологии, опасаясь спугнуть потенциальных покупателей и спровоцировать негативную общественную реакцию и напрасные опасения.
Чем бы ни была система Unimate, устройство стоимостью $25 тысяч серьезно расширяло набор возможностей промышленного предприятия. Аппарат “запоминал” последовательности из 200 шагов, а главное — справлялся с тысячекратным повторением рутинных задач.
Первый прототип машины приобрела General Motors в далеком 1961 году. А уже в 1969 году рабочие компании устроили бунт, связанный с появлением автоматизированного предприятия в Лордстауне, Огайо — “роботы” вынудили людей трудится гораздо быстрее, чем в привычном им темпе. Гнев сотрудников отразился на производимой продукции: некоторые автомобили несли на себе скрытые повреждения, дефекты и прочие признаки вандализма. Вероятнее всего, именно этот момент стал переломным в истории роботизации: вместо повышения производительности труда людей, в GM погнались за минимизацией издержек и попытались выжать максимум из людей и оборудования.
Настоящий успех ждал Unimation за пределами США: клиентами компании стали Nokia, Fiat и Kawasaki Heavy Industries — эти компании сыграли существенную роль в подъеме японского автопрома и робототехники в 1980-х. Профсоюзы и чудовищная бюрократия не позволили США своевременно использовать накопленный технологический потенциал: Америка не воспользовалась преимуществами лидера и основателя новой производственной парадигмы.
Несмотря на изобретение и популяризацию концепции промышленной робототехники, Unimation не получала серьезных прибылей до 1975 года, а затем и вовсе оказалась раздавлена конкурентами.
Источник изображения.
Корни автоматизации тесно переплетены и с боулингом: кеглеустановочные машины избежали гнева рабочих и профсоюзов, а американская компания AMF приобрела патент и представила миру первые полуавтоматические пинсеттеры в 1937 году. В 1958 году компания представила миру систему Versatran — ключевого конкурента Unimate.
Возможно, именно боулинг стал “праотцом” современных форм взаимодействия людей и роботов: машины автоматизируют рутинные, скучные и монотонные операции, а также освобождают клиентов от излишнего общения с незнакомцами. Сегодня аналогичный подход используется в некоторых заведениях общепита и логистических сервисах, несказанно улучшая жизнь интровертов, а в будущем его роль существенно возрастет.
Интересно и то, как мечты отдельных изобретателей и популяризаторов машин и науки легли в основу современной промышленной революции: машины способны окончательно положить конец эксплуатации человека человеком, лишив труд людей товарной ценности и открыв миру дорогу в новый Золотой век.
По материалам: motherboard.vice.com. + +
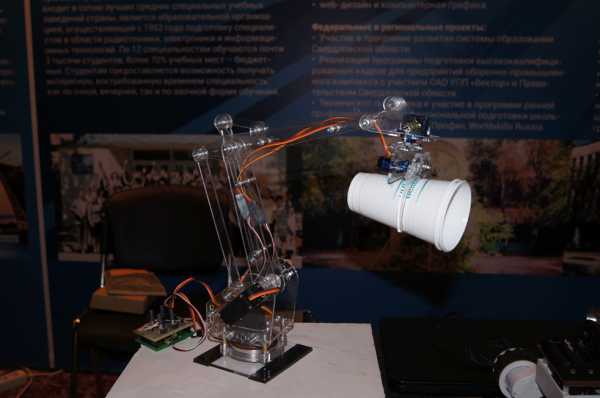
Настольная робо-рука манипулятор из оргстекла на сервоприводах своими руками или реверс-инжиниринг uArm
Привет, гиктаймс!Хочу поделиться с вами результатами реверс-инжиниринга uArm – простого настольно манипулятора из оргстекла на сервоприводах.
Проект uArm от uFactory собрал средства на кикстартере уже больше двух лет назад. Они с самого начала говорили, что это будет открытый проект, но сразу после окончания компании они не торопились выкладывать исходники. Я хотел просто порезать оргстекло по их чертежам и все, но так как исходников не было и в обозримом будущем не предвиделось, то я принялся повторять конструкцию по фотографиям.
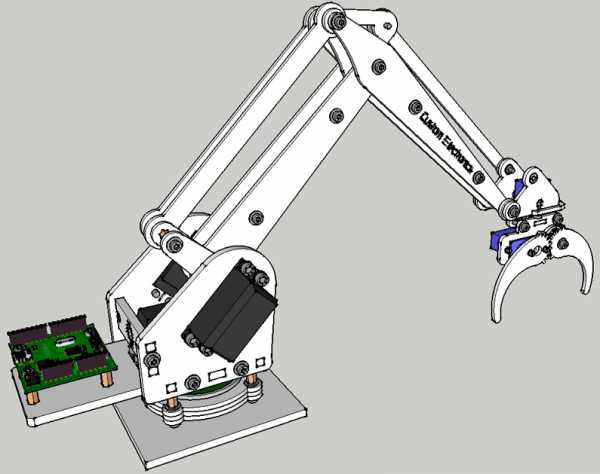
Сейчас моя робо-рука выглядит так:

Работая не спеша за два года я успел сделать четыре версии и получил достаточно много опыта. Описание, историю проекта и все файлы проекта вы сможете найти под катом.
Пробы и ошибки
Начиная работать над чертежами, я хотел не просто повторить uArm, а улучшить его. Мне казалось, что в моих условиях вполне можно обойтись без подшипников. Так же мне не нравилось то, что электроника вращается вместе со всем манипулятором и хотелось упростить конструкцию нижней части шарнира. Плюс я начал рисовать его сразу немного меньше.
С такими входными параметрами я нарисовал первую версию. К сожалению, у меня не сохранилось фотографий той версии манипулятора (который был выполнен в желтом цвете). Ошибки в ней были просто эпичнейшие. Во-первых, ее было почти невозможно собрать. Как правило, механика которую я рисовал до манипулятора, была достаточно простая, и мне не приходилось задумываться о процессе сборки. Но все-таки я его собрал и попробовал запустить, И рука почти не двигалась! Все детли крутились вокруг винтов и, сли я затягивал их так, чтобы было меньше люфтов, она не могла двигаться. Если ослаблял так, чтобы она могла двигаться, появлялись невероятные люфты. В итоге концепт не прожил и трех дней. И приступил к работе над второй версией манипулятора.

Красный был уже вполне пригоден к работе. Он нормально собирался и со смазкой мог двигаться. На нем я смог протестировать софт, но все-таки отсутствие подшипников и большие потери на разных тягах делали его очень слабым.
Затем я забросил работу над проектом на какое-то время, но вскоре принял решении довести его до ума. Я решил использовать более мощные и популярные сервоприводы, увеличить размер и добавить подшипники. Причем я решил, что не буду пытаться сделать сразу все идеально. Я набросал чертежи на скорую руки, не вычерчивая красивых сопряжений и заказал резку из прозрачного оргстекла. На получившемся манипуляторе я смог отладить процесс сборки, выявил места, нуждающиеся в дополнительном укреплении, и научился использовать подшипники.
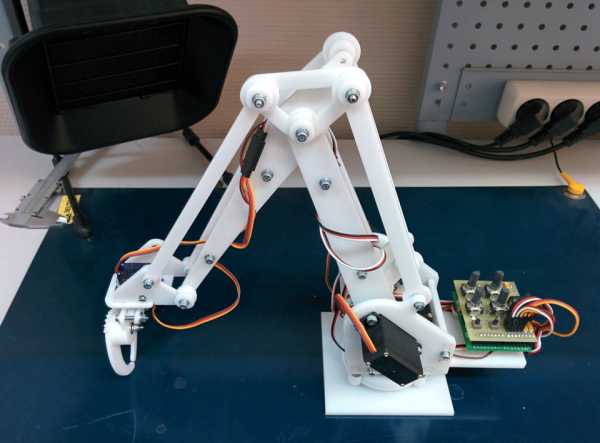
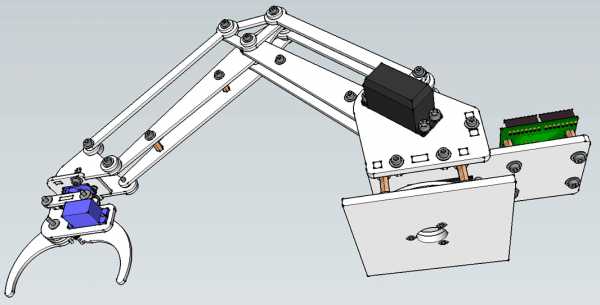
После того, как я вдоволь наигрался с прозрачным манипулятором, я засел за чертежи финальной белой версии. Итак, сейчас вся механика полностью отлажена, устраивает меня и готов заявить, что больше ничего не хочу менять в этой конструкции:
Меня удручает то, что я не смог привнести ничего принципиально нового в проект uArm. К тому времени, как я начал рисовать финальную версию, они уже выкатили 3D-модели на GrabCad. В итоге я только немного упростил клешню, подготовил файлы в удобном формате и применил очень простые и стандартные комплектующие.
Особенности манипулятора
До появления uArm, настольные манипуляторы подобного класса выглядели достаточно уныло. У них либо не было электроники вообще, либо было какое-нибудь управление с резисторами, либо было свое проприетарное ПО. Во-вторых, они как правило не имели системы параллельных шарниров и сам захват менял свое положение в процессе работы. Если собрать все достоинства моего манипулятора, то получается достаточно длинный список:
- Система тяг, позволяющих разместить мощные я тяжелые двигатели в основании манипулятора, а также удерживающие захват параллельно или перпендикулярно основанию
- Простой набор комплектующих, которые легко купить или вырезать из оргстекла
- Подшипники почти во всех узлах манипулятора
- Простота сборки. Это оказалось действительно сложной задачей. Особенно трудно было продумать процесс сборки основания
- Положение захвата можно менять на 90 градусов
- Открытые исходники и документация. Все подготовлено в доступных форматах. Я дам ссылки для скачивания на 3D-модели, файлы для резки, список материалов, электронику и софт
- Arduino-совместимость. Есть много противников Arduino, но я считаю, что это возможность расширения аудитории. Профессионалы вполне могут написать свой софт на C — это же обычный контроллер от Atmel!
Механика
Для сборки необходимо вырезать детали из оргстекла толщиной 5мм:
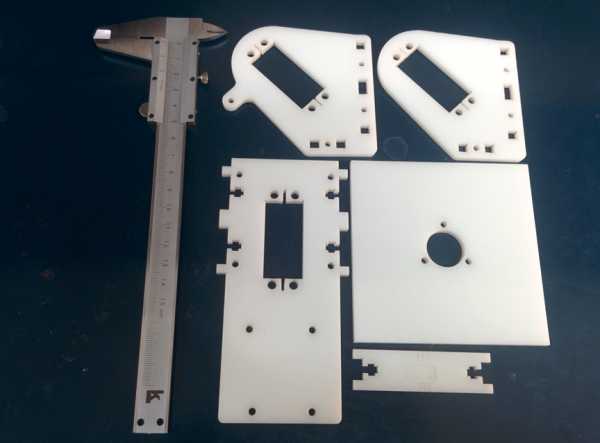
… и 3мм:
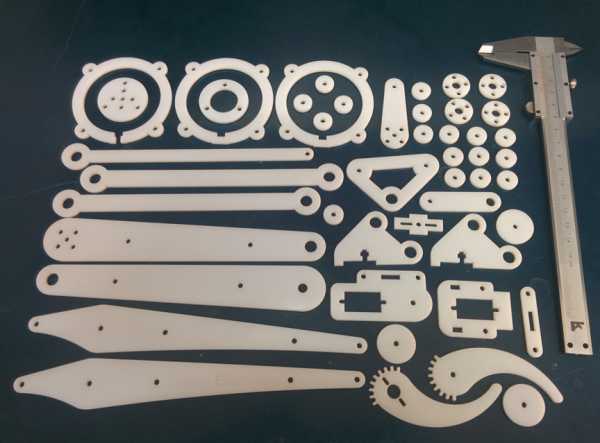
С меня за резку всех этих деталей взяли около $10.
Основание монтируется на большом подшипнике:
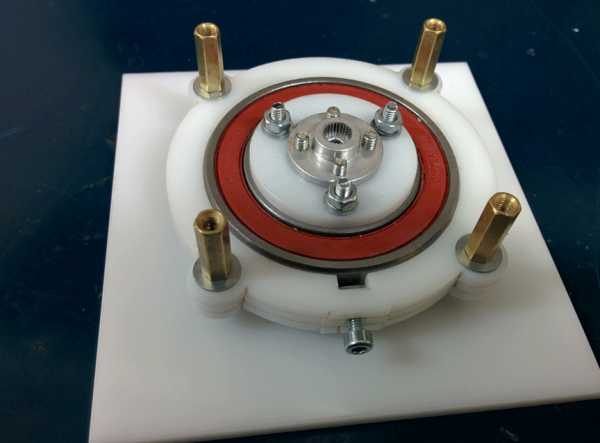
Особенно трудно было продумать основание с точки зрения процесса сборки, но я подглядывал за инженерами из uArm. Качалки сидят на штифте диаметром 6мм. Надо отметить, что тяга локтя у меня держится на П-образном держателе, а у uFactory на Г-образном. Трудно объяснить в чем разница, но я считаю у меня получилось лучше.

Захват собирается отдельно. Он может поворачиваться вокруг своей оси. Сама клешня сидит прямо на валу двигателя:

В конце статьи я дам ссылку на суперподробную инструкцию по сборке в фотографиях. За пару часов можно уверенно все это скрутить, если все необходимое есть под рукой. Также я подготовил 3D-модель в бесплатной программе SketchUp. Её можно скачать, покрутить и посмотреть что и как собрано.
Электроника
Чтобы заставить руку работать достаточно всего навсего подключить пять сервоприводов к Arduino и подать на них питание с хорошего источника. У uArm использованы какие-то двигатели с обратной связью. Я поставил три обычных двигателя MG995 и два маленьких двигателя с металлическим редуктором для управления захватом.
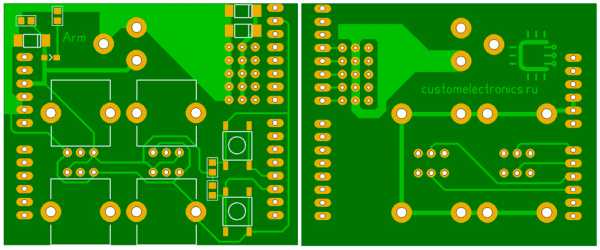
Тут мое повествование тесно сплетается с предыдущими проектами. С некоторых пор я начал преподавать программирование Arduino и для этих целей даже подготовил свою Arduino-совместимую плату. С другой стороны как-то раз мне подвернулась возможность дешево изготовить платы (о чем я тоже писал). В итоге все это закончилось тем, что я использовал для управления манипулятором свою собственную Arduino-совместимую плату и специализированный шилд.

Этот шилд на самом деле очень простой. На нем четыре переменных резистора, две кнопки, пять разъемов для сервопривода и разъем питания. Это очень удобно с точки зрения отладки. Можно загрузить тестовый скетч и записать какой-нибудь макрос для управления или что-нибудь вроде того. Ссылку для скачивания файла платы я тоже дам в конце статьи, но она подготовлена для изготовления с металлизацией отверстий, так что мало пригодна для домашнего производства.
Программирование
Самое интересное, это управление манипулятором с компьютера. У uArm есть удобное приложение для управления манипулятором и протокол для работы с ним. Компьютер отправляет в COM-порт 11 байт. Первый из них всегда 0xFF, второй 0xAA и некоторые из оставшихся — сигналы для сервоприводов. Далее эти данные нормализуются и отдаются на отработку двигателям. У меня сервоприводы подключены к цифровым входам/выходам 9-12, но это легко можно поменять.
Терминальная программа от uArm позволяет изменять пять параметров при управлении мышью. При движении мыши по поверхности изменяется положение манипулятора в плоскости XY. Вращение колесика — изменение высоты. ЛКМ/ПКМ — сжать/разжать клешню. ПКМ + колесико — поворот захвата. На самом деле очень удобно. При желании можно написать любой терминальный софт, который будет общаться с манипулятором по такому же протоколу.
Я не буду здесь приводить скетчи — скачать их можно будет в конце статьи.
Видео работы
И, наконец, само видео работы манипулятора. На нем показано управление мышью, резисторами и по заранее записанной программе.
Ссылки
Файлы для резки оргстекла, 3D-модели, список для покупки, чертежи платы и софт можно скачать в конце моей основной статьи.
Подробная инструкция по сборке в фотографиях (осторожно, траффик).
habr.com
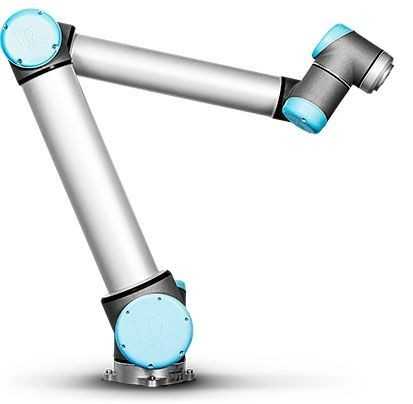
Обзор роботов-манипуляторов Universal Robots / Top 3D Shop corporate blog / Habr

Здравствуйте! Рассказываем о линейке коллаборативных роботов-манипуляторов Universal Robots.
Компания Юниверсал-роботс родом из Дании, занимается выпуском коллаборативных роботов-манипуляторов для автоматизации циклических производственных процессов. В этой статье приведем их основные технические характеристики и рассмотрим области применения.
Что это?
Продукция компании представлена линейкой из трех облегченных промышленных манипуляционных устройств с разомкнутой кинематической цепью: UR3, UR5, UR10.
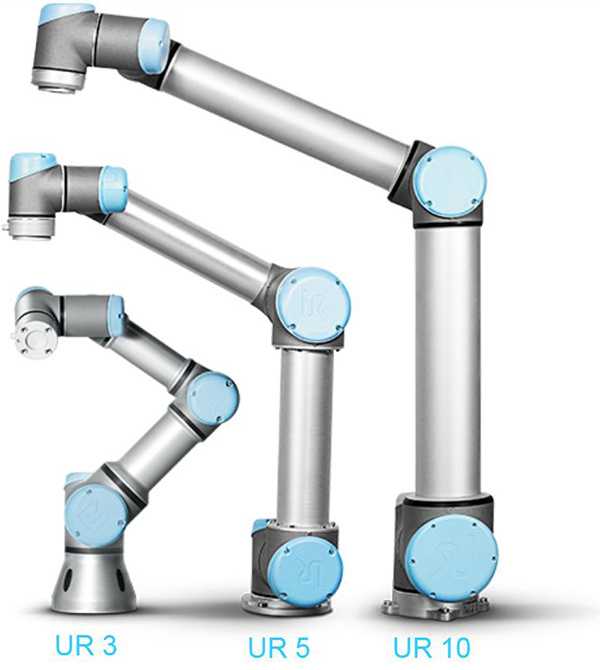
Все модели имеют 6 степеней подвижности: 3 переносные и 3 ориентирующие. Устройства от Юниверсал-роботс производят только угловые перемещения.

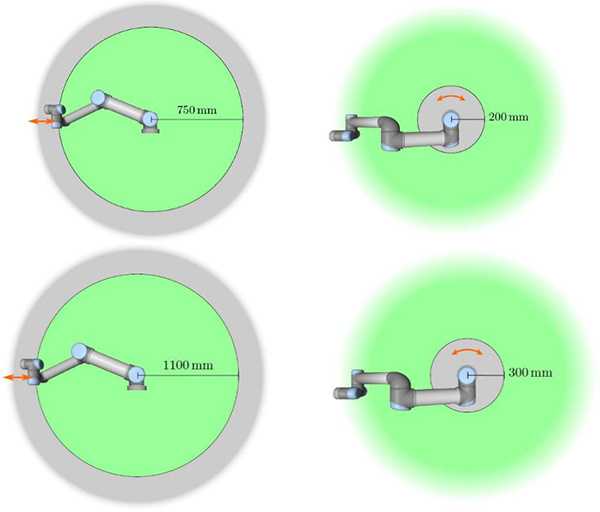
Роботы-манипуляторы разделены на классы, в зависимости от предельно допустимой полезной нагрузки. Другими отличиями являются — радиус рабочей зоны, вес и диаметр основания.
Все манипуляторы UR оснащены датчиками абсолютного положения высокой точности, которые упрощают интеграцию с внешними устройствами и оборудованием. Благодаря компактному исполнению, манипуляторы UR не занимают много места и могут устанавливаться в рабочих секциях или на производственных линиях, где не помещаются обычные роботы.


Характеристики:
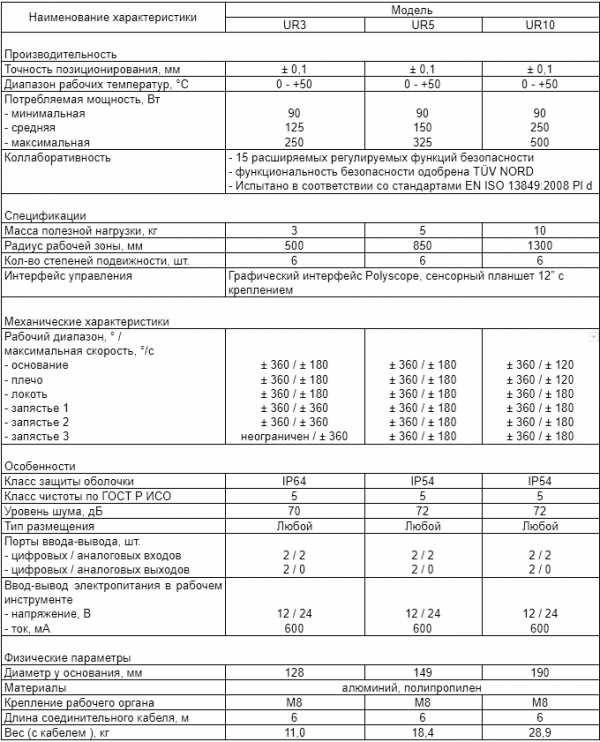
Чем интересны
Простота программирования
Специально разработанная и запатентованная технология программирования позволяет операторам, не владеющим специальными навыками, быстро выполнить настройку роботов-манипуляторов UR и управлять ими с помощью интуитивной технологии 3D-визуализации. Программирование происходит путем серии простых передвижений рабочего органа манипулятора в необходимые положения, либо нажатием стрелок в специальной программе на планшете.

UR3:
UR5:
UR10:
Быстрая настройка
Оператору, выполняющему первичный запуск оборудования, потребуется менее часа для распаковки, монтажа и программирования первой простой операции.

UR3:
UR5:
UR10:
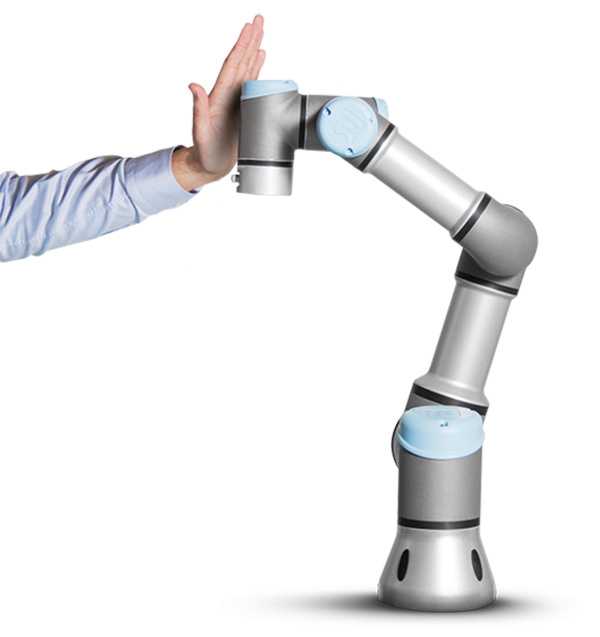
Коллаборативность и безопасность
Манипуляторы UR способны заменить операторов, выполняющих рутинные задачи в опасных и загрязненных условиях. В системе управления ведется учет внешних возмущающих воздействий, оказываемых на робот-манипулятор в процессе работы. Благодаря этому, манипуляционные системы UR можно эксплуатировать без защитных ограждений, рядом с рабочими местами персонала. Системы безопасности роботов одобрены и сертифицированы TÜV – Союзом работников технического надзора Германии.
UR3:
UR5:
UR10:
Многообразие рабочих органов
На конце промышленных манипуляторов UR предусмотрено стандартизированное крепление для установки специальных рабочих органов. Между рабочим органом и конечным звеном манипулятора можно установить дополнительные модули силомоментных сенсоров или камер.

Возможности применения
С промышленными роботами-манипуляторами UR открываются возможности автоматизации практически всех циклических рутинных процессов. Устройства компании Юниверсал-роботс отлично зарекомендовали себя в различных областях применения.
Перекладка
Установка манипуляторов UR на участках перекладки и упаковки позволяет увеличить точность и уменьшить усадку. Большинство операций по перекладке может осуществляться без надзора.
Полировка, буферовка, шлифовка
Встроенная система датчиков позволяет контролировать точность и равномерность прикладываемого усилия на криволинейных и неровных поверхностях.

Литье под давлением
Высокая точность повторяющихся движений позволяет применять роботы UR для задач переработки полимеров и инжекционного литья.

Обслуживание станков с ЧПУ
Класс защиты оболочки обеспечивает возможность установки манипуляционных систем для совместной работы со станками ЧПУ.


Упаковка и штабелирование
Традиционные технологии автоматизации отличаются громоздкостью и дороговизной. Легко настраиваемые роботы UR способны работать без защитных экранов рядом с сотрудниками или без них 24 часа в сутки, обеспечиваю высокую точность и производительность.

Контроль качества
Роботизированный манипулятор с видеокамерами пригоден для проведения трехмерных измерений, что является дополнительной гарантией качества выпускаемой продукции.
Сборка
Простое устройство крепления рабочего органа позволяет оснащать роботы UR подходящими вспомогательными механизмами, необходимыми для сборки деталей из дерева, пластика, металла и других материалов.
Свинчивание
Система управления позволяет контролировать развиваемый момент во избегании избыточной затяжки и обеспечения требуемого натяжения.

Склеивание и <a href=»»>сварка
Высокая точность позиционирования рабочего органа позволяет сократить количество отходов при выполнении операций склейки или нанесения веществ.
Промышленные роботы-манипуляторы UR могут выполнять различные типы сварки: дуговую, точечную, ультразвуковую и плазменную.


Итого:
Промышленные манипуляторы от Юниверсал-роботс компактны, легки, просты в освоении и обращении. Роботы UR – гибкое решение для широкого круга задач. Манипуляторы можно запрограммировать на любые действия присущие движениям человеческой руки, а вращательные движения им удаются намного лучше. Манипуляторам не свойственны усталость и боязнь получить травму, не нужны перерывы и выходные.
Решения от Юниверсал-роботс позволяют автоматизировать любой рутинный процесс, что увеличивает скорость и качество производства.
Обсудите задачи автоматизации производственных процессов с помощью манипуляторов от Юниверсал-роботс с официальным дилером — в Top 3D Shop.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:
habr.com
Роботы в промышленности — их типы и разновидности / Top 3D Shop corporate blog / Habr

Что это?
Это статья об индустриальном применении робототехники. Применение роботов в промышленности началось, по историческим меркам, не так давно — чуть больше, чем полвека назад, но сейчас уже мало какое производство можно представить себе без автоматических линий, без стальных манипуляторов и зорких стеклянных зрачков роботов — эти железные ребята прочно вошли в большинство производственных процессов и уходить не собираются.

Несмотря на такое обширное, почти повсеместное распространение роботов, лишь специалисты в полной мере представляют себе весь спектр их возможностей. В этой статье мы приоткроем дверь в мир промышленной робототехники для широкого круга читателей: опишем некоторые разновидности производственных роботов и сферы их применения. Нельзя объять необъятное в одной статье, но, если читателям будет интересно, мы обязательно продолжим.
Так какие они бывают — роботы?
Есть несколько классификаций промышленных роботов: по типу управления, по степени мобильности, по области применения и специфике совершаемых операций.
По типу управления:
Управляемые роботы: требуют, чтобы каждым их движением управлял оператор. В силу узости областей применения распространены мало. Да и не совсем роботы.
Автоматы и полуавтономные роботы: действуют строго по заданной программе, зачастую не имеют сенсоров и не способны корректировать свои действия, не могут обойтись без участия рабочего.
Автономные: могут совершать запрограммированный цикл действий без участия человека, согласно заданным алгоритмам и корректируя свои действия по мере необходимости. Такие роботы способны полностью перекрыть поле деятельности на своем участке конвейера, без привлечения живой рабсилы.
По функциям и сфере применения:
Роботы разделяются по назначению и исполняемым функциям, вот лишь некоторые из них: промышленные роботы бывают универсальные, сварочные, машиностроительные, режущие, комплектовочные, сборочные, упаковочные, складские, малярные.
Это далеко не полный перечень: количество всевозможных вариантов постоянно растет и все перечислить невозможно в рамках одной статьи. Можно лишь с уверенностью сказать о том, что вряд ли найдется такая область человеческой деятельности, где роботы не смогли бы сделать труд человека более творческим, взяв всю монотонную и опасную часть работы на себя.
Другие методы классификации
У каждой энциклопедии, каждого справочника и каждого производителя своя классификация и типология роботов. Что и не удивительно — зачастую она определяется сугубо специфическими нуждами и частным подходом того, кто её составляет.
Помешает ли это нам рассмотреть некоторые образцы и понять — что же они умеют? Нет конечно. Поехали.
Рассмотрим образцы
Среди промышленных роботов выделяется продукция таких известных фирм, как Kuka, Fanuc, Universal Robots, некоторые образцы которых мы рассмотрим чуть ниже.
KUKA KR QUANTEC PA Arctic

KUKA KR QUANTEC PA — один из лучших роботов-палетоукладчиков на рынке. KUKA KR QUANTEC PA Arctic — его модификация, робот функционирующий при экстремально низких температурах. Он создан для работы преимущественно в морозильных камерах, при температурах до -30 °C. Электронные и механические части аппарата не нуждаются в защите от мороза, снега, инея, а также не выделяют излишнего тепла. Радиус действия манипулятора модификации Арктик, как и у стандартного KUKA KR QUANTEC PA, составляет 3195 мм, а полезная нагрузка — до 240 кг. Аппарат идеален для применения в пищевой промышленности и в условиях крайнего севера. Кроме составления штабелей из паллетов, робот может выполнять и другие манипуляции, ведь точность его движений, а точнее говоря — стабильность повторяемости позиционирования, составляет 0,06 мм.
FANUC M-2000iA/1200

FANUC M-2000iA/1200 — пятиосевой грузоподъемный робот поднимающий до 1200 кг и перемещающий этот груз на расстояние до 3,7 м — идеален в качестве погрузчика, так как работает без участия человека, что практически сводит к нулю опасность травматизма. Работает при температурах 0°C — +45 °C. Стабильность повторяемости — 0,03 мм.
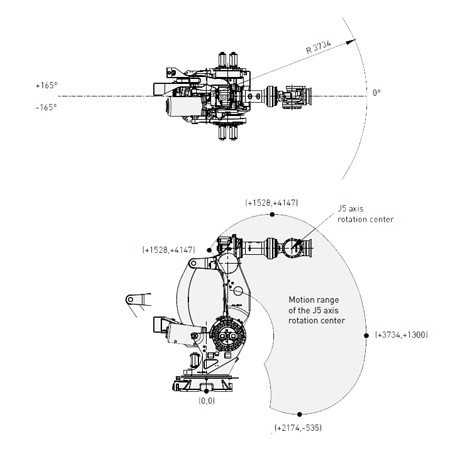
Крайне прочный аппарат.
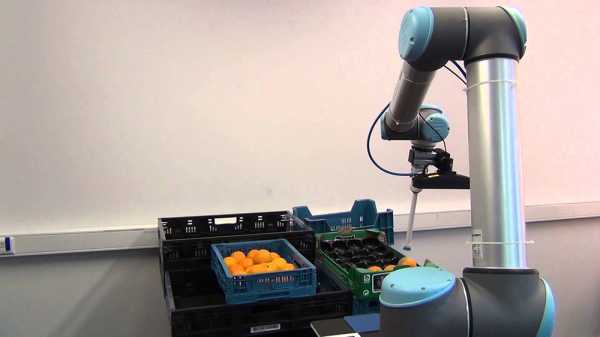
Universal Robots — UR10
UR10 — самый крупный из манипуляторов Universal Robots и это коллаборативный робот, проще говоря — он создан для работы с другим оборудованием и помощи в работе человеку.
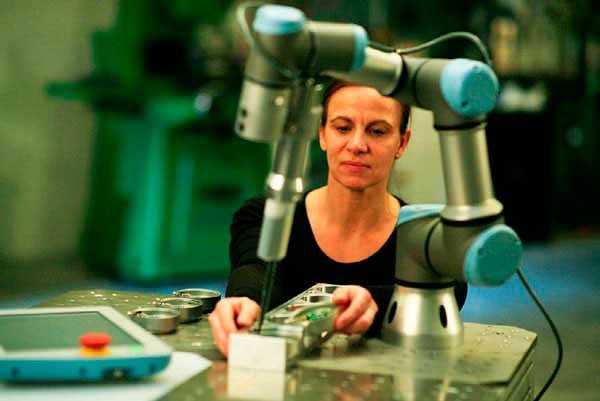
Манипулятор модели UR10 имеет радиус действия 1,3 м и поднимает груз до 10 кг. Его можно использовать с сельскохозяйственным, фармацевтическим, технологическим и многим другим оборудованием. Компактно размещается на рабочем месте человека, чтобы стать ему “третьей рукой”, легко программируется и быстро настраивается.
UR10 умеет завинчивать, клеить, сваривать и паять, производить литьевые и сборочные работы.
Также роботы Universal Robots применены в проекте Voodoo Manufacturing: Project Skywalker компании Medium Corporation — это фабрика 3D-печати, многие операции на которой выполняют именно роботы-манипуляторы. Такие действия, как замена платформ для печати, сбор и складирование готовых изделий больше не требуют неустанного внимания персонала.
Особенно интересны универсальные роботы, так как именно они, в силу своего назначения, снабжены наиболее адаптивными системами управления.
Rethinkrobotics
Это такие роботы, как Baxter и Sawyer производства Rethinkrobotics.
Baxter — многофункциональный робот с двумя манипуляторами и системами обратной связи и самообучения.

Его 7-осевые манипуляторы способны почти на всё, на что способна рука человека, в том числе — имеют обратную связь и могут контролировать прилагаемые усилия. Это, плюс ещё особенности дизайна, делают Бакстера безопасным для живых рабочих — его рабочее место не нуждается в ограждении, да и вообще — места он занимает немного, что здорово экономит пространство в цеху. Пара бакстеров способна успешно работать вместе.

Бакстер интересен еще и тем, что не требует тщательного подробного программирования каждого своего действия — “учить” его можно не только через интуитивно понятное визуальное приложение, но и прямо на рабочем месте — повторяя показанные движения он запоминает их и применяет в дальнейшем.
Sawyer — “младший брат” Бакстера — удивительно компактный и легкий робот-манипулятор, он весит всего 19 килограмм и может быть установлен почти где угодно, не занимая при этом много места.

Точность действий Сойера доходит до 0,1 мм, что позволяет использовать его в сотнях видов комплектовочных, сборочных и других конвейерных работ.
Оба робота легко переобучаются для выполнения новых функций даже без применения традиционного программирования и столь же просто перемещаются с одного рабочего места на другое.
Гибридное производство
Stratasys Infinite-Build 3D Demonstrator
Очень интересным представляется подход компании Stratasys, которая создала промышленный аппарат нового типа — гибрид робота и 3D-принтера.

Конечно, любой 3D-принтер обладает признаками робота, но тут — это совершенно традиционной формы роботизированный манипулятор, имеющий в том числе и функцию FDM-печати. Stratasys Infinite-Build 3D Demonstrator предназначен, прежде всего, для авиационного и космического производства, в котором так важна его способность производить печать на вертикальных поверхностях неограниченной площади, в соответствии с концепцией “infinite-build” — “бесконечное построение”. С работой над проектом связаны такие монстры, как аэрокосмический гигант Boeing и автоконцерн Ford, которые предоставили Stratasys спецификации по необходимым характеристикам получаемых изделий.

Восьмиосевой механизм манипулятора, обилие специально разработанных композитных материалов для печати, традиционно высокое качество изготовления — все говорит нам о том, что у этого аппарата и его потомков большое будущее.
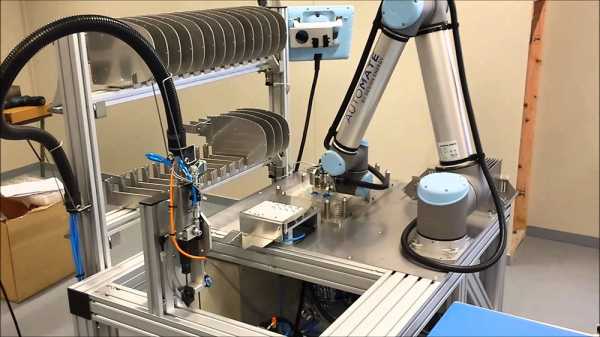
3D Systems — Figure 4
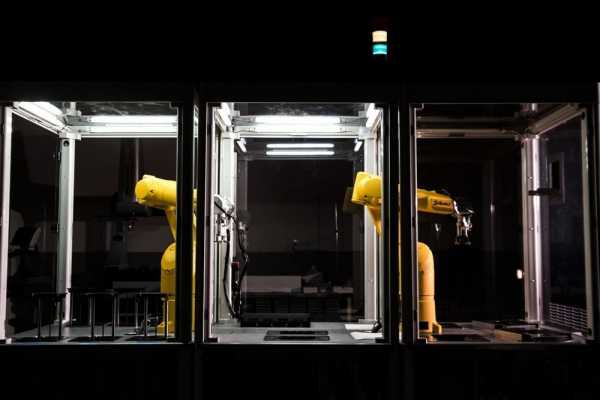
Figure 4 компании 3D Systems — модульная робототехническаяя система для автоматизации стереолитографической 3D-печати, ни больше, ни меньше.

Это целый автоматический комплекс, который способен производить новые изделия каждые несколько минут — в отличие от нескольких часов на обычных SLS-принтерах.

Кроме того, в цикл уже включены и такие этапы, как промывка, отделение поддержек и дозасветка, а не только первичная экспозиция. Все это Figure 4 делает сам, без вмешательства оператора в процесс работы.
Благодаря модульности, на основе Figure 4 можно создать достаточно крупные автоматические линии, используя стандартные компоненты.
Этот комплекс был представлен общественности в этом году, на выставке The International Dental Show в Кёльне, как и новый 3D-принтер ProJet CJP 260Plus — полноцветный 3D-принтер предназначенный для анатомического моделирования медицинских изделий и быстрого прототипирования любых промышленных образцов.


Принтер также роботизирован — снабжен системой автоматической загрузки, удаления и переработки печатного порошка.
Можно с уверенностью сказать, что комплексный подход к 3D-печати — часть производственной культуры будущего. Он даст радикально новое сочетание скорости, точности, удобства и снижения себестоимости изделий.
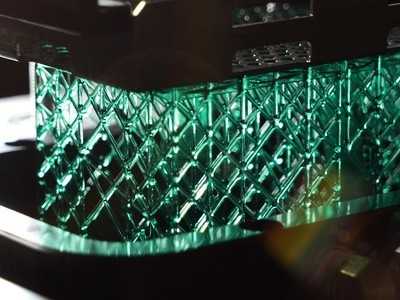
Carbon — Carbon SpeedCell

Carbon SpeedCell — технологическое решение от компании Carbon, которое включает в себя новый 3D-принтер The M2, работающий по технологии CLIP, и финишинговый аппарат для стереолитографических распечаток Smart Part Washer.

CLIP — технология бесслойной стереолитографической печати, обеспечивающая скорость от 25 до 100 раз быстрее обычной SLS и новый уровень качества поверхности.
Система CLIP (Continuous Liquid Interface Production) позволяет получить невозможные ранее формы изделий требующие минимальной постобработки. Точных характеристик аппаратного комплекса производитель пока не предоставил, но сам подход уже радует — это почти готовое решение для любой мастерской, в которой требуется стереолитографическая печать.
DMG MORI — LASERTEC 65 3D

Аппарат сочетающий в себе несколько разных подходов к обработке деталей: это и классический фрезерный станок с программным управлением — пятиосевой и весьма точный, и лазерный режущий инструмент с теми же степенями свободы, и печатающий металлом 3D-принтер с технологией лазерного напыления. Сложно представить себе операцию, которую не смог бы произвести этот станок с металлической деталью. Гибридный подход: фрезеровка заготовки, наплавление недостающих деталей или печать с нуля и чистовая обработка — все операции могут произведены с деталью за один подход, в рамках одной заданной программы, без прерывания технологического цикла. Размер обрабатываемой и/или печатаемой детали составляет до 600 на 400 мм, а вес может быть до 600 кг.
Такое МФУ для работы по металлу уже многое изменило в культуре производства штучных и мелкосерийных изделий, а в ближайшее время подобный подход может распространиться и на серийное производство.
EOS — Additive Manufacturing
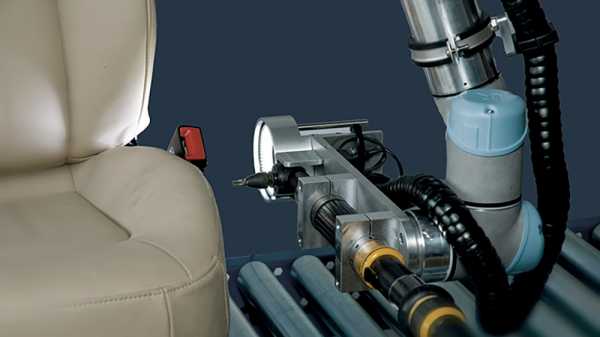
Компания EOS создала манипуляторы, которые способны производить различные операции, где требуется захват и перемещение детали. Разработки EOS в этой области основываются на наблюдениях за поведением животных, в частности — этот манипулятор создан по примеру хобота слона.
Такой робот-манипулятор может быть использован во множестве промышленных операций, как то: в транспортировке и упаковке, в перемещении деталей из одной рабочей зоны в другую, например — из 3D-принтера в камеру пост-обработки, чтобы исключить участие человека на этом этапе.
Вот так он устроен:
https://youtu.be/vQ_Zh0bxhs8
Также компания спонсирует и представляет проект Roboy — это мобильный гуманоидный робот, который способен выполнять любые движения свойственные человеку и служить помощником на производстве.
Concept Laser и Swisslog — M Line Factory

Известный производитель печатающих металлом 3D-принтеров, Concept Laser заключил соглашение с компанией Swisslog, их общий проект — M Line Factory, это система перемещения металлических 3D-печатных деталей между станками Concept Laser с помощью роботов Swisslog.
https://youtu.be/0v4LAbjfJxc
Компании продолжают совершенствование аппаратных комплексов для 3D-печати металлом. Роботизированные составляющие этих машин способны провести деталь через весь цикл — от загрузки проекта в память, до выхода готового изделия на склад, — без необходимости вмешательства оператора.
Additive Industries — The MetalFAB1
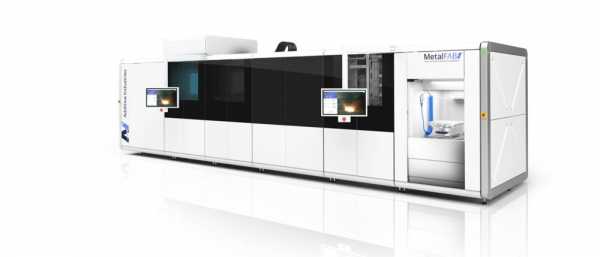
Единственная в своем роде установка — единая система для печати, транспортировки из рабочей камеры и хранения готовых деталей. Фактически — готовый цех металлической 3D-печати в одном корпусе.
Существуют роботы, которые способны выполнять функции сварочных и фрезерных станков c программным управлением.
А также такие, которые обслуживают традиционные фрезерные ЧПУ-станки, увеличивая их производительность.
Например, вот так это делает упомянутый выше Sawyer:
https://youtu.be/XU6thj7cQ5c
Выводы
Роботы в современной промышленности везде. Они в любом цеху и в любой области производства. И это нормально: роботы экономят деньги работодателей, а рабочих спасают от вредной и монотонно-отупляющей работы; роботы работают круглосуточно и безостановочно; роботы намного точнее живых рабочих — они не устают, у них не “замыливается глаз”, их сенсоры и системы позиционирования способны сохранять точность до сотых долей миллиметра.
Пока мы видим их еще не везде — многие производственные процессы скрыты от рядового пользователя, да и не особо интересны обычно, — но совсем скоро невозможно будет не замечать того, что подавляющая часть всех материальных благ производится умными машинами.
Хотите больше интересных новостей из мира 3D-технологий?
Подписывайтесь на нас в соц. сетях:
habr.com
Как сделать продвинутую роботизированную руку
Перевел SaorY для mozgochiny.ru
Доброго дня, мозгоинженеры! Это мозгоруководство расскажет вам как своими руками создать высококачественную роботизированную руку, причем с малыми затратами по себестоимости.





Данная «open source» мозгоподелка превосходит аналогичные робо-руки не только по цене сборки, но и по производительности, и не уступает даже промышленным. А если использовать в ней биоэлектрическое управление, то она достаточно легко выполняет захват различных предметов, таких как электроотвертка, крышка или батарейка.
Шаг 1: Сравнение производительности аналогов
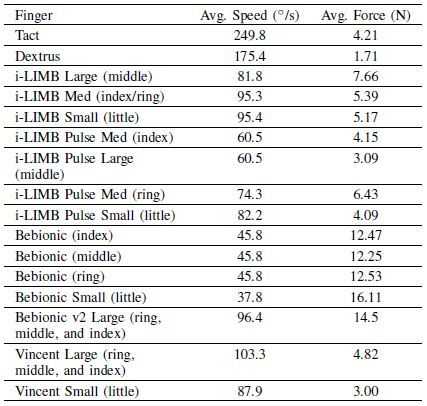

Как уже было сказано, данная самоделка не уступает промышленным аналогам, и достигнуто это тщательным подбором компонентов. На первой представленной таблице показано сравнение характеристик двигателя, который используется в коммерческих робо-руках и выбранным мной.
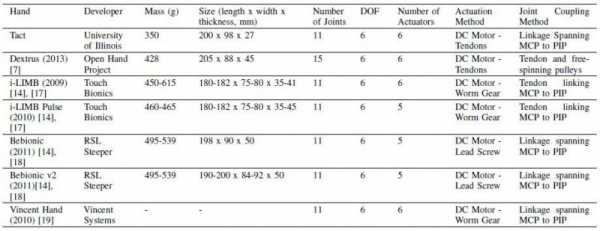
Зная производительность двигателей из промышленных аналогов, я подобрал подходящий по мощности, но более дешевый двигатель, то есть сила сжатия пальцев моей робо-руки как и у промышленных. Но как показано на второй таблице, скорость пальцев моей мозгоподелки выше коммерческих аналогов, что облегчает захват предметов и повышает производительность. На третьей таблице показаны размер и вес компонентов робо-руки и аналогов, и исходя из них видно, что использование 3D компонентов облегчает общий вес поделки.
По сравнению с OpS (open source) аналогами сила захвата данной робо-руки в 2.5 раза больше, вес на 20% меньше, а ладонь примерно наполовину тоньше. То есть по характеристикам эта самоделка имеет преимущества для пользователя. Кроме того, пальцы робо-руки действуют более согласовано, суставы сгибаются пропорционально и надежно каждый раз, что обеспечивает поделке стабильное и производительное функционирование. Конструкция многих OpS аналогов проста – «сухожилие» просто проходит внутри пальца и стягивается по принципу лебедки, что приводит к неловким, резким движениям руки и несогласованности суставов.
И все же, несмотря на описанные преимущества, данная робо-поделка имеет и недостатки. Так напечатанные 3D компоненты более подвержены механическим повреждениям по сравнению с металлическими компонентами аналогов, то есть их проще сломать, но и при этом, проще отремонтировать. Еще в этой робо-руке отсутствует фиксирующий механизм, то есть необходимо постоянно прикладывать силу для удержания захвата, что снижает энергоэффективность.
Шаг 2: Компоненты

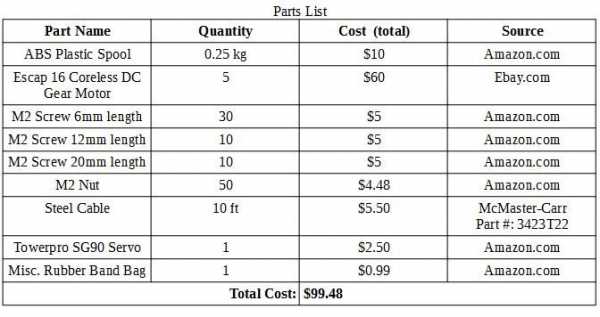
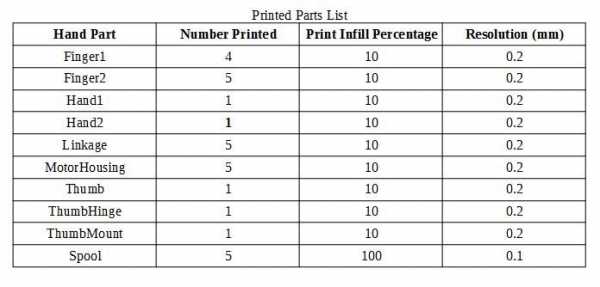
Конструкция этой робо-руки разрабатывалась на основе общедоступных и 3D-печатных компонентов, весь список которых, а также места приобретения, представлены в таблицах на мозгофото. Конкретные ссылки я не привожу из-за частой смены поставщиков, но если какой-либо компонент недоступен, то не бойтесь менять его на аналогичный!
Кроме того понадобятся: отвертки, иглогубцы, кусачки, супер-клей и конечно же 3D-принтер. Если у вас нет такого, то можно воспользоваться вот этим ресурсом, который осуществляет 3D-печать по предоставленным вами файлам. Кстати файлы находятся вот здесь, а по этой ссылке учебник, который пригодится новичкам в Github.
Свои 3D-компоненты я распечатал с разрешением 0.2мм и 10% заполнением, что обеспечивает довольно быструю печать (около 14 часов) с необходимой прочностью получаемых деталей. Вам я тоже советую печатать детали для этой робо-поделки на максимальных значениях разрешения и заполнения вашего принтера.
Шаг 3: Сборка пальцев




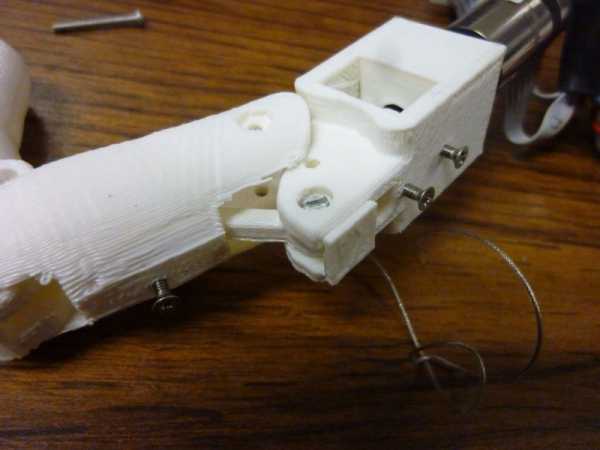

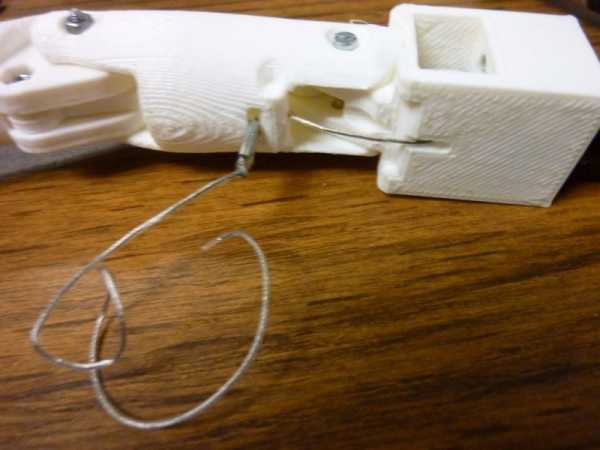
Все пальцы, включая и большой, собираются однотипно, и этот процесс подробно показан на фото, а еще подробнее в инструкции.
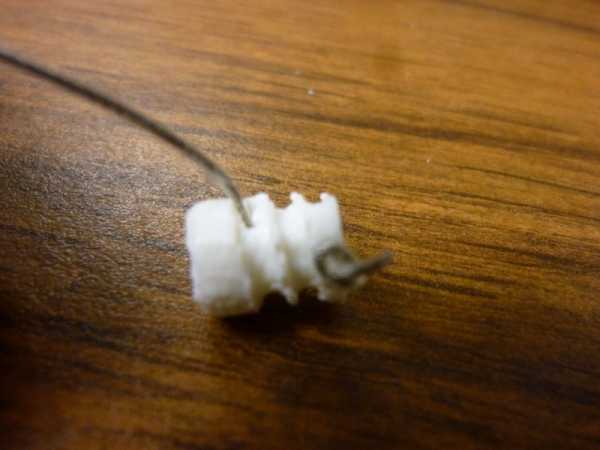
На одном конце металлического тросика завязываем узел и скрепляем его каплей супер-клея, затем пропускаем тросик сквозь отверстие катушки до упора узелка. Пропускаем так, чтобы узелок оказался сверху катушки, а свободный конец выходил из нижнего отверстия.
Берем двигатель и нанизываем на его вал катушку, при этом нанизываем так, чтобы плоскость катушки плотно прилегла к плоскости вала, иначе есть риск повредить ее.
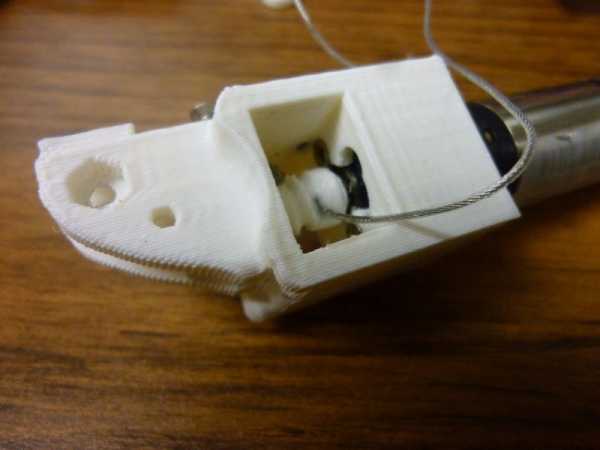
В элемент корпуса двигателя вставляем в небольшие отверстия два 6мм-х винта М2, аккуратно устанавливаем этот элемент на двигатель, находим нужное положение катушки/двигателя и закрепляем винтами.
Собираем элементы кончика пальца и связку, для крепления используем винты и гайки М2. При этом крепим не плотно, оставляя достаточную степень свободы суставам.
Через среднюю фалангу пропускаем связку и соединяем с верхней частью пальца, ориентируемся при этом на фото, а затем скрепляем 20мм-ми винтами М2 обе части пальца.
Далее соединяем связку с соответствующим отверстием в корпусе двигателя и закрепляем ее 12мм-м винтом М2, для этого потребуется полностью согнуть палец.
Соединяем палец с корпусом двигателя и через отверстие в нижней части скрепляем 20мм-м винтом М2.
Пропускаем свободный конец тросика внутри корпуса двигателя и через отверстие в нижней части пальца, завязываем узел, закрепляем его каплей супер-клея и обрезаем лишний конец тросика кусачками.
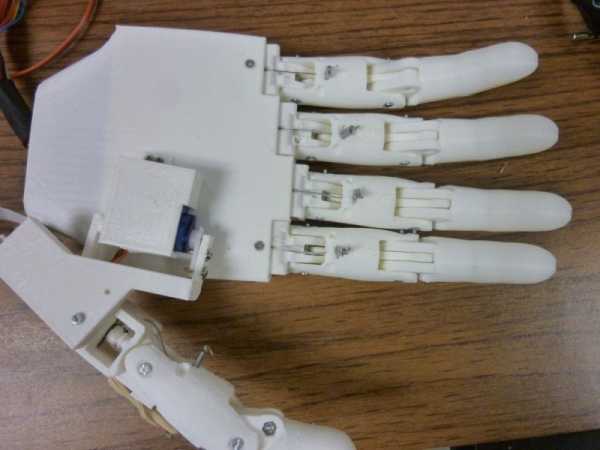
Повторяем все шаги с оставшимися пальцами, в том числе и большим, который хотя и имеет некоторое отличие в деталях, собирается аналогично. Когда все пальцы собраны, приступаем к ладони: берем пластину с 4 отверстиями, это задняя часть, и крепим к ней собранные пальцы на 6мм-ые винты М2. После этого устанавливаем переднюю пластину и закрепляем ее в двух местах к крайним пальцам 6мм-ми винтами М2.
Шаг 4: Сервопривод



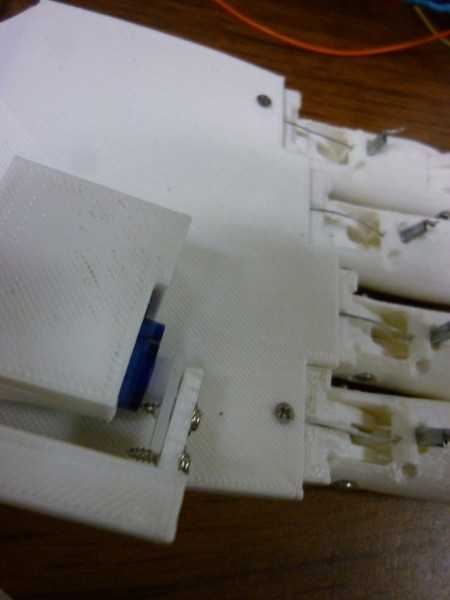
Приступаем к окончательной мозгосборке. Берем сервопривод и вставляем в распечатанный для него суппорт, который должен плотно подходить к сервоприводу.
На большой палец монтируем кронштейн, который будет сцеплять его с сервоприводом и закрепляем 6мм-м винтом М2.
Кронштейн большого пальца соединяем с сервоприводом и закрепляем винтами, после этого прикладываем всю конструкцию большого пальца/сервопривода к передней пластине руки и в соответствующих местах скрепляем 6мм-ми винтами М2.
Механическая сборка завершена!
Шаг 5: Управление



Обычно современные протезы управляются биоэлектрическим контроллером, который считывает небольшие напряжения мышц, называемыми электромиографическими (ЭМГ) сигналами. Анализируя эти сигналы, контроллер понимает, какие мышцы задействованы, и, следовательно, какое положение должен принять протез. Для этого процесса требуется комплексный 8-ми канальный EMG чип и программный алгоритм обучения, который называется линейный дискриминантный анализ. Но это вопрос более продвинутого и ответственного применения самоделки, который требует больших познаний в электронике и программировании, а сейчас поступим проще.
Первый простой способ — это использование производимых вот этой фирмой одноканальных ЭМГ-плат совместимых с микроконтроллерами, например с Arduino. И платы, и микроконтроллеры дешевы и доступны, а также имеют много инструкций и мозгоруководств по применению.
Второй способ подходит для людей занимающихся компьютерными технологиями. Суть его в создании PID-контроллера или кнопочного управления для перемещения руки в различные положения.
Еще одним способом является голосовое управление, с которым можно ознакомиться здесь.
На этом все, надеюсь было полезно. Удачи в вашем мозготворчестве!
(A-z Source)
ПОДЕЛИТЕСЬ С ДРУЗЬЯМИ!
About SaorY
mozgochiny.ru
Рекламные роботы как бизнес

Как еще можно заманить случайного прохожего в небольшой магазин (кроме яркой вывески) и заставить его пешком преодолеть с десяток ступеней? Теперь это можно сделать при помощи рекламного робота.

Он не только двигается, вращая перед собой рекламный баннер, он еще и озвучивает рекламу, привлекая внимание прохожих.
Вот как он (она) это делает, смотрите на видео:
Предприниматели говорят, что такой рекламный робот увеличивает им продажи в среднем на 30 процентов.
Потому что он привлекает внимание у проходящей мимо толпы и поток посетителей увеличивается примерно на 60 процентов. Как этот робот привлекает внимание людей, смотрите его глазами на этом видео:
Придумал и сделал этих роботов предприниматель из Санкт-Петербурга Михаил Кузнецов. Вернее, не придумал, а подсмотрел на Западе.
Он как раз открыл новую точку своего зоомагазина и размышлял над ее раскруткой. Поначалу делал как все — печатал рекламные листовки и нанимал промоутеров. Это принесло увеличение продаж на 17%, но всю прибыль съели зарплата промоутеров и печать листовок.
Надо было придумать какой-то другой вариант, чтобы продажи увеличивались, а расходы — нет.
Сначала он установил световую рекламную прямоугольную конструкцию с внешним питанием. Но после того как однажды сильный ветер ее опрокинул, порвав провода, решил делать беспроводные конструкции.
Со временем он пришел к конструкции в виде робота (потому что объект в виде человека всегда более привлекателен). Дал в руки робота рекламный баннер и заставил его вращаться. Потом добавил к конструкции и звук.

В первый же месяц, когда он установил своего рекламного рода перед дверьми своего зоомагазина, продажи увеличились на 78%.
Почувствовав потенциал своего детища, Михаил закрыл свой зообизнес — и открыл рекламное агентство Adstuff — streetwins.ru. Которое сегодня изготавливает, продает и сдает в аренду рекламных роботов.

(рекламного робота можно одеть как угодно — под сферу вашей деятельности)

Роботы предлагаются двух видов:
2D — плоские:
и 3D-роботы — объемные:
Также эта компания продает стритвины (мобильные рекламные конструкции с подсветкой, бегущей строкой и звуком):

и динамический штендер (та конструкция, что находилась в руках у рекламного робота, только без него самого):

(картинка не передает движение, на самом деле этот штендер вертится)
Это вид рекламы еще в новинку для российских городов. С другой стороны, именно сейчас нужно оживлять нашу местную торговлю (пока она вся еще не загнулась).
Если вы хотите заняться подобным рекламным бизнесом, можете либо придумать нечто такое же оригинальное, привлекающее внимание к местным кафе и магазинам, либо воспользоваться уже готовым решением. Фирма Adstuff как раз сейчас активно ищет региональных представителей в большинстве российских городов и за рубежом.
Компания уже имеет представительства в городах: Ярославль, Череповец, Сочи, Краснодар, Стерлитамак, Екатеринбург, Тюмень, Нижний Тагил, Новосибирск, Благовещенск, Минск. Остальные города — свободны для сотрудничества.
Вы в своем регионе можете продавать предпринимателям подобные рекламные конструкции, а также сдавать их в аренду (представительство в Сочи, как сообщается в документах компании, окупилось уже через 2 месяца после открытия).
Необходимую информацию по сотрудничеству вы найдете в группе ВКонтакте компании — vk.com/streetwins
homebusiness.ru
Каталог промышленных роботов
см. также Коллаборативные роботы
Российские роботы
ARKODIM, «Торговый дом «Аркодим», Татарстан
Промышленные линейные роботы-манипуляторы ARKODIM
GRINIK, GRINIK Robotics (ООО «АвангардПЛАСТ»), Новосибирск
Разработка, собственное производство и продажа промышленных роботов GRINIK
PSX, SMITEK (ООО Смайтек), Россия
Портальный робот обеспечивающий высокоточное позиционирование технологического средства (сварочного аппарата, гидроабразивной резки, лазерного датчика) по 5 координатам в пространстве.
«Эйдос-Медицина» в 2018 году ведет разработку промышленного шестиосевого робота. / 2018.05.04 business-gazeta.ru
Зарубежные роботы
Arcsystem, Yaskawa, Япония
Сварочный комплекс. Один или два манипулятора и ограждение. Комплекс может выпускаться в одной из 600 комбинаций рабочих инструментов, треков для перемещения и основаниями.
Baxter, Rethink Robotics, США
промышленный робот, 2 руки. Разработан в 2012 году. К середине 2015 года продано менее 1000 роботов. В качестве недостатка отмечается низкая скорость работы робота.
BRAVO, TAL, Индия
первый промышленный робот (5-осевой) разработанный и собираемый в Индии.
2017.04.30 Первый промышленный робот Made in India.
Comau Smart SiX 6-1.4
CR-35iA, Fanuc, Япония
Коллаборативный промышленный манипулятор с уникальной для таких систем грузоподъемностью до 35 кг.
FoxBot, Foxconn, Тайвань
2016.10 На предприятиях Foxconn Group установлено уже 40 тысяч роботов FoxBot. Ежегодно выпускается около 10 000 роботов. Большую часть компонентов для них (кроме приводов и редукторов), Foxconn выпускает самостоятельно, включая контроллеры и ПО.
В 2015.04 Foxconn поставила три первых робота в лапшичные Dazzing Noodles в Китае, где они выполняют функции приготовления пищи, включая извлечение готовой лапши из горячей воды. 2015.05.05 Роботы Foxconn начали готовить лапшу.
Franka, Franka Emika, Германия
Манипулятор коллаборативного типа, разработанный стартапом. Предназначен для позиционирования инструментов, может выполнять сверлильные и сборочные операции. Использует тензодатчики и системы управления крутящим моментом. Поставки намечены на 2017 год. Программирование модульного типа или путем задания траектории движением манипулятора. Успешные операции можно сохранять в облаке. 7 степеней свободы. Точность до 0.1 мм. Длина — до 80 см с объектом до 3 кг. Ориентировочная стоимость $10 тыс.
2017.01.13 Franka Emika — бюджетный «умный» коллаборативный робот.
Hyundai YS100, Hyundai, Южная Корея
IRB 1100, ABB Robotics, Европа
6-осевой промышленный робот с грузоподъемностью 4 кг (радиусы действия 475 мм и 580 мм). Анонсирован в октябре 2018 года, доступность для заказов — с декабря 2018 года.
2018.10.12 ABB представляет IRB 1100 — своего самого компактного и легкого 6-осевого робота.
IRB 6640-2352.55, ABB Robotics, Европа
Используется, например, в составе роботизированной моечной машины FlexWasher, включающая камеру предварительной промывки, основную камеру с роботом IRB 6640-2352.55, сушильную камеру, станцию очистки и фильтрации воды.
2015.08.18 ABB оснастила моечными машинами FlexWasher завод Ford Sollers в Елабуге
KUKA KR 5 arc
промышленный робот для работы с легкими грузами
KR 5-2 arc HW, KUKA
промышленный робот для работы с легкими грузами
KR 6-2, KUKA
промышленный робот для работы с легкими грузами
КК 16-2, KUKA
промышленный робот для работы с легкими грузами
KR 16-2 CR, KUKA
промышленный робот для работы с легкими грузами
KR 16-2 F, KUKA
промышленный робот для работы с легкими грузами
KR 16-2 KS-F, KUKA
промышленный робот для работы с легкими грузами
KR 16-3 S, KUKA
промышленный робот для работы с легкими грузами
KR 16 arc HW, KUKA
промышленный робот для работы с легкими грузами
KR 16 L6-2, KUKA
промышленный робот для работы с легкими грузами
KR 16 L6-2 KS, KUKA
промышленный робот
KR 30-3, KUKA
для работы с грузами до 30 кг, максимальная длина — 2033 мм
KR 30-3 CR, KUKA
промышленный робот
KR 30-3 F, KUKA
промышленный робот
KR 30-4 KS, KUKA
промышленный робот
KR-30-4 KS-F, KUKA
промышленный робот
KR-30 HA, KUKA
промышленный робот повышенной точности
KR 30 L16-2, KUKA
промышленный робот
KR 40 PA, KUKA
промышленный робот
KR 60-3, KUKA
промышленный робот
KR 60-3 F, KUKA
промышленный робот
KR 60-4 KS, KUKA
промышленный робот
KR 60-4 KS-F, KUKA
промышленный робот
KR 60 L16-2 KS, KUKA
промышленный робот
KR 60 HA, KUKA
промышленный робот
LaserSnake2, OC Robotics, Объединенное Королевство
Роботизированный манипулятор с точным позиционированием по всем степеням свободы, оснащенный мощным лазерным резаком с оптической фокусировкой для резки любого материала. Управляется дистанционно. Проект разрабатывался с 2013 года, испытан в 2016 году.
LBR iiwa 7 R800, KUKA Robotics, Германия
Коллаборативный робот с сенсорной системой распознавания
2015.05 Робот помощник археолога был представлен на международной выставке в мае 2015 года. Выполненый на основе промышленного робота — манипулятора KUKA LBR iiwa, помощник археолога способен снимать грунт и проводить очистку окаменелостей, склейку деталей, выемку фрагментов. Среди достоинств робота — способность неутомимо совершать мельчайшие движения кистями и скребками в круглосуточном режиме. Робот также умеет фотографировать все участки фрагмента в HD-формате, фиксировать изменения, проводить радиоуглеродный анализ. 2015.08.07 Роботы-археологи: железная рука помощи
LBR iiwa 14 R820, KUKA Robotics, Германия
Коллаборативный робот с сенсорной системой распознавания
LR Mate-200, Fanuc, Япония
72 см. Для работы с грузами до 1 кг.
LS3-B, Epson, Япония
SCARA робот, нагрузка до 3 кг. Анонс в апреле 2019.
LS6-B, Epson, Япония
SCARA робот, нагрузка до 6 кг. Анонс в апреле 2019.
LS10-B, Epson, Япония
SCARA робот, нагрузка до 10 кг. Анонс в апреле 2019.
LS20-B, Epson, Япония
SCARA робот, нагрузка до 20 кг. Анонс в апреле 2019.
M-710, Fanuc, Япония
Серия легковесных роботов для работы с грузами от 20 до 70 кг. Компактное запястье, жесткая конструкция руки, узкая база и зона досягаемости до 3.1 м. Высокие угловые скорости, хорошие инерционные показатели.
M-2000iA/1700L, Fanuc, Япония

2015.06.11 FANUC, японский производитель роботов и систем автоматизации, заявила о создании самого мощного в мире промышленного робота, способном поднимать 1.7 тонн. Максимальный вынос руки составляет 4.7 метров. Робот обладает 6-ю осями свободы, сильными «запястьями», обеспечивающими надежное функционирование и высокую точность движений. Робота представят в октябре 2015 года на выставке EMO в Милане. Видео по ссылке.
Motoman MH-24, Yaskawa Electric, Япония
2015.06.03 Промышленный робот Motoman MH-24 демонстрирует владение катаной. Видео на Youtube.
MXE350L, Kawasaki
Промышленный робот, рассчитанный на высокие нагрузки.
NextAge, Kawada Industries, Inc.

Кооперативный робот с двумя манипуляторами, коммерчески доступен с 2009 года. Официальный сайт: global.kawada.jp
2015.07.07 Использование кооперативных роботов набирает обороты в Японии.
Roberta, ABB Robotics, Европа
Перспективная коллаборативная система.
Sawyer, Rethink Robotics, США
Коллаборативный промышленный робот. Развитие идей Baxter, но может работать быстрее и точнее. В коммерческой доступности с 2015.09
Sensabot, NREC, США
Телеуправляемая роботизированная платформа для наблюдения за промышленными объектами, особенно во взрывоопасных или агрессивных средах.
uArm Swift, UFACTORY
Настольный робоманипулятор с 4DOF, полезной нагрузкой до 0.5 кг. Встроенный порт, пакет управления по блочной схеме, работает автономно без подключения к ПК или с ПК. Повторяемость до 5 мм.
2017.02.11 uArm Swift и uArm Swift Pro — настольные мини-манипуляторы для «домашнего» применения
uArm Swift Pro, UFACTORY
Настольный робоманипулятор с 4DOF, полезной нагрузкой до 0.5 кг. Встроенный порт, пакет управления по блочной схеме, работает автономно без подключения к ПК или с ПК. Повторяемость до 0.2 мм.
2017.02.11 uArm Swift и uArm Swift Pro — настольные мини-манипуляторы для «домашнего» применения
Unix 410S, Japan Unix
Паяльные роботы серии 410S.
2015.10.05 В Мексике покажут настольные паяльные роботы серии 410S компании Japan Unix
UR10, Universal Robots, Дания
Коллаборативная система. Способен работать с весом до 10 кг (22 фунта)
UR5, Universal Robots, Дания
Коллаборативная система. Способен работать с весом до 5 кг (11 фунтов)
UR3, Universal Robots, Дания
Коллаборативная система. Способен работать с весом до 3 кг (6.5. фунтов)
VT6L, Epson, Япония
6-осевой манипулятор VT6L, досягаемость до 900 мм с грузом до 6 кг. Манипулятор начального уровня. Ориентир цены — $13900. Анонс в апреле 2019.
xArm, UFactory, Китай
Коллаборативный робот, модели xArm 5 Lite, xArm 6, xArm 7
2018.10.24 xArm — рука, протянутая малому бизнесу
YuMi, ABB Robotics, Европа
2 манипулятора.
robotrends.ru